You have probably seen the ads on Saturday morning television proclaiming the amazing abilities of the "Super Ultra Road-rippin' Devastator" or some other radio controlled (RC) car. And you may have seen people at the park flying a model airplane or blimp, or controlling a miniature boat sailing serenely across a pond.
In this article, you will learn all about radio control. You will find out what frequencies are used for RC toys, what the different components are and how they all work together. You will also learn what the difference between radio control and remote control is when talking about toys or models.
Advertisement
Types of RC Toys
RC toys come in a large variety of models, including:
- Cars
- Trucks
- Fantasy vehicles
- Airplanes
- Helicopters
- Blimps
- Sailboats
- Motor boats
- Submarines
- Robots
- Animals
While the mechanics of how they operate can differ greatly between different toys, the basic principle is the same. All radio controlled toys have four main parts:
- Transmitter - You hold the transmitter in your hands to control the toy. It sends Radio waves to the receiver.
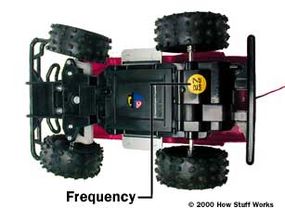
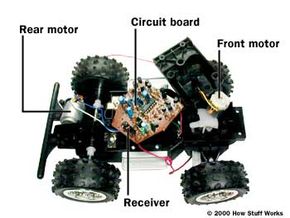
- Receiver - An antenna and circuit board inside the toy receives signals from the transmitter and activates motors inside the toy as commanded by the transmitter.
- Motor(s) - Motors can turn wheels, steer the vehicle, operate propellers, etc.
- Power source
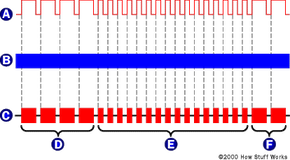
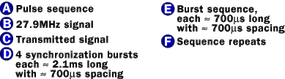
The transmitter sends a control signal to the receiver using radio waves (see How Radio Works for details), which then drives a motor, causing a specific action to occur. The motor in a car may cause the wheels to turn, while the motor in a plane may adjust the flaps. The power source is typically a rechargeable battery pack, but sometimes it's just normal batteries.
In many of the RC toys, the radio controlled motor provides guidance while another source of power provides the locomotion. Here are some examples:
- A model airplane often has a small gas-powered engine to turn the propeller; the RC motor controls the flaps.
- A sailboat uses the wind for propulsion; the RC motor controls the rudder.
- A blimp uses helium or hot air for lift; the RC motors control small propellers.
Now let's take a closer look at each of the main components.
Advertisement